联系人: 王经理
手 机:
15552837172、13953879721
电 话:0538-3496888
Q Q:290552405
地 址:山东省肥城市潮泉镇工业开发区

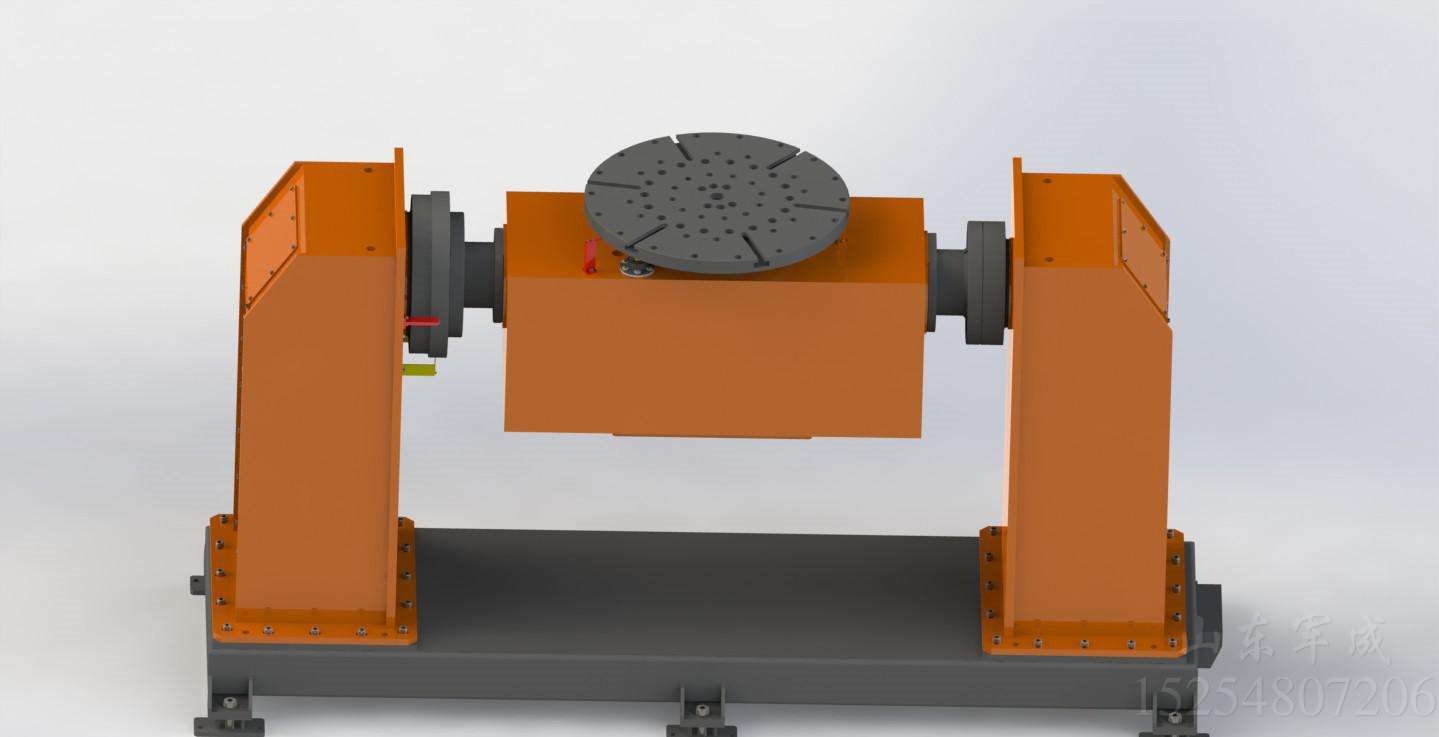
可以肯定的讲,如果一台变位机拖动焊件,仅做直线运动,哪怕是三维的,也不可能改变焊缝的姿态,满足施焊要求。也就是说,变位运动是回转运动,称此回转运动为变位机的主自由度。
还可以做这样一个假设:在X、Y、Z直角坐标系下,设有一空间直线焊缝,绕Z轴可在360°范围内回转,且这个Z轴连同这一焊缝又可绕X(或Y)轴在≥180°范围内回转,那么,经此变位的焊缝,便可变到船角焊位置进行施焊作业。换言之,一个焊口由两个面的共线MN和夹角α组成,在上述两个回转范围内,经恰当的回转,便可使其共线 MN 与水平面平行,且这两个面与水平面的夹角相等,各为α/2,即变为船角焊位置。这个假设是说,任何复杂焊件,只要装在主自由度为一个全回转和一个半回转的焊接变位机上,即可实现船焊要求。我们称这种双回转式焊接变位机为全功能变位机。





 扫一扫
扫一扫